I2C 数字空速计
常接 Pixhawk / PX4 / ArduPilot 的 I2C 口,飞控需要启用对应空速计驱动。
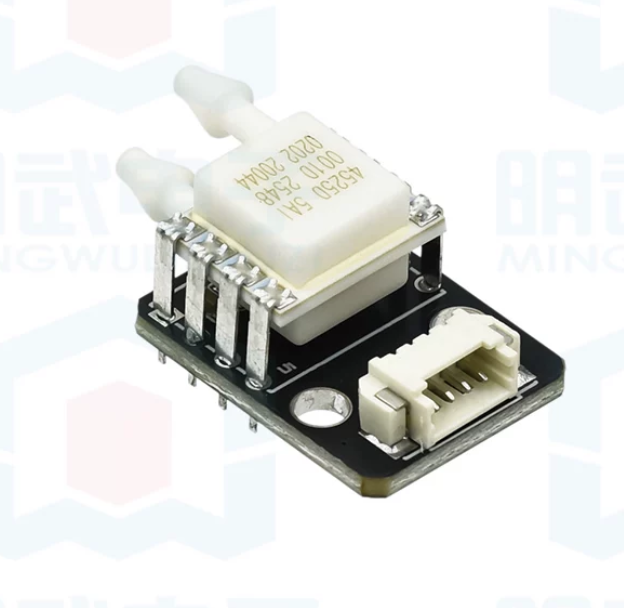
Product Photos
以下图片为店铺自有实物图,已确认可以公开使用。背面丝印可见 `GND / SDA / SCL / VCC`,但线材颜色和连接器实际线序仍要按实物确认。

Overview
MS4525DO 空速计通过皮托管测量动压差,再由飞控换算空速。它常用于固定翼和 VTOL,不是普通模拟压力传感器,也不是直接输出 PWM/电压的模块。
常接 Pixhawk / PX4 / ArduPilot 的 I2C 口,飞控需要启用对应空速计驱动。
接线成功后仍需要做空速校准;软管漏气、气嘴接反都会让数据异常。
完整订货型号、量程、默认 I2C 地址和 4Pin 线序以实物批次为准。
Pixhawk / PX4

| 03084 模块 | Pixhawk / PX4 I2C | 说明 |
|---|---|---|
| VCC | VCC / 5V 或 3.3V | 以飞控 I2C 口和模块说明为准 |
| GND | GND | 必须共地 |
| SDA | SDA | I2C 数据线 |
| SCL | SCL | I2C 时钟线 |
注意:不同飞控接口线序可能不同,不要只按线材颜色判断。
I2C Test
下面接法用于确认模块能否被 I2C 扫描到,不等于完成飞控空速标定。

#include <Wire.h>
void setup() {
Wire.begin();
Serial.begin(115200);
while (!Serial) {}
Serial.println("I2C Scanner");
}
void loop() {
byte count = 0;
for (byte address = 1; address < 127; address++) {
Wire.beginTransmission(address);
if (Wire.endTransmission() == 0) {
Serial.print("Found I2C device at 0x");
if (address < 16) Serial.print("0");
Serial.println(address, HEX);
count++;
}
}
if (count == 0) Serial.println("No I2C devices found");
delay(3000);
}Pitot Tube
当前图片能确认有两个气嘴,但正负端、动压/静压对应关系不能仅凭图片判断,页面先标为待确认。

Flight Controller
常见参数为 SENS_EN_MS4525DO。不同 PX4 版本界面可能不同,以当前飞控固件文档为准。
MS4525DO 常见 ARSPD_TYPE = 1。是否需要设置 ARSPD_BUS、ARSPD_USE、ARSPD_RATIO 以当前固件为准。
装机后必须按飞控流程做空速校准。软管漏气、气嘴接反、强光照射传感器都可能造成读数异常。
FAQ
先检查 I2C 口供电、GND、SDA、SCL,再确认飞控固件和参数是否启用 MS4525DO。不同飞控 I2C 口线序不一定一样。
检查皮托管方向、软管是否漏气、气嘴正负是否接反、是否完成空速校准。部分压力传感器也要避免强光直射。
可以先用 Arduino / ESP32 做 I2C 扫描确认通信,但航模使用仍建议按 PX4 / ArduPilot 官方流程设置和校准。
MS4525DO 系列资料里有 3.3V 或 5V 供电版本,但当前模块批次是否带稳压/电平转换仍待确认,接飞控时按飞控 I2C 口和模块实物说明为准。
Customer Reply
References